How to Read Angle From the Adxl345 Arduino
In this tutorial we will learn how to measure bending and track orientation using the Arduino and the ADXL345 Accelerometer sensor. You can watch the following video or read the written tutorial below for more details.
Overview
First, I will explain how the sensor work and how to read the data from information technology, and and so using the Processing development surround, nosotros volition make a 3D visualization of the accelerometer orientation.
How ADXL345 Accelerometer Works
To begin with, let'due south have a look how the ADXL345 sensor works. This is a 3-axis accelerometer which can measure both static and dynamic forces of dispatch. The earth gravitational force is a typical example of static force, while dynamic forces can be acquired past vibrations, movements and so on.
The unit of measurement of measurement for acceleration is meter per second squared (yard/south^2). Nevertheless, accelerometer sensors usually limited the measurements in "k" or gravity. One "yard" is the value of the globe gravitational force which is equal to 9.8 meters per 2d squared.
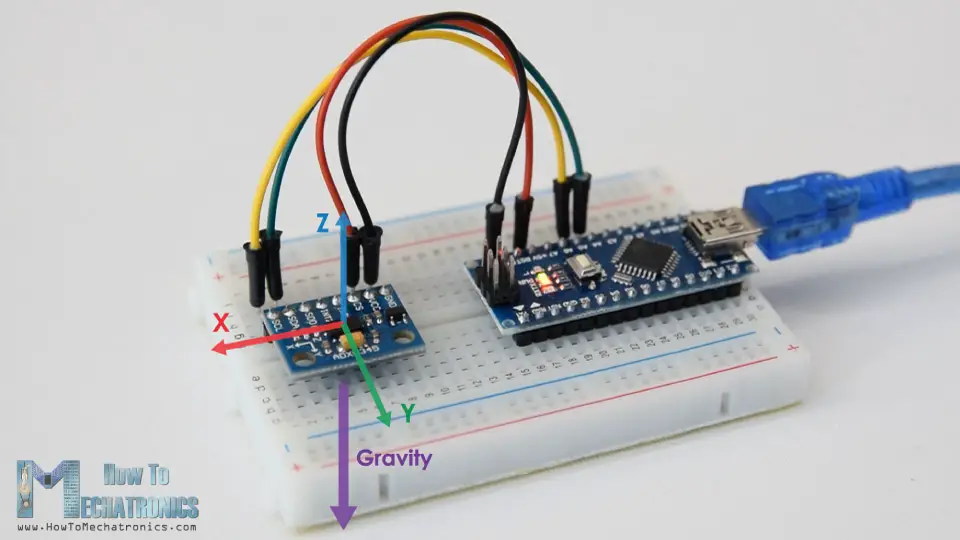
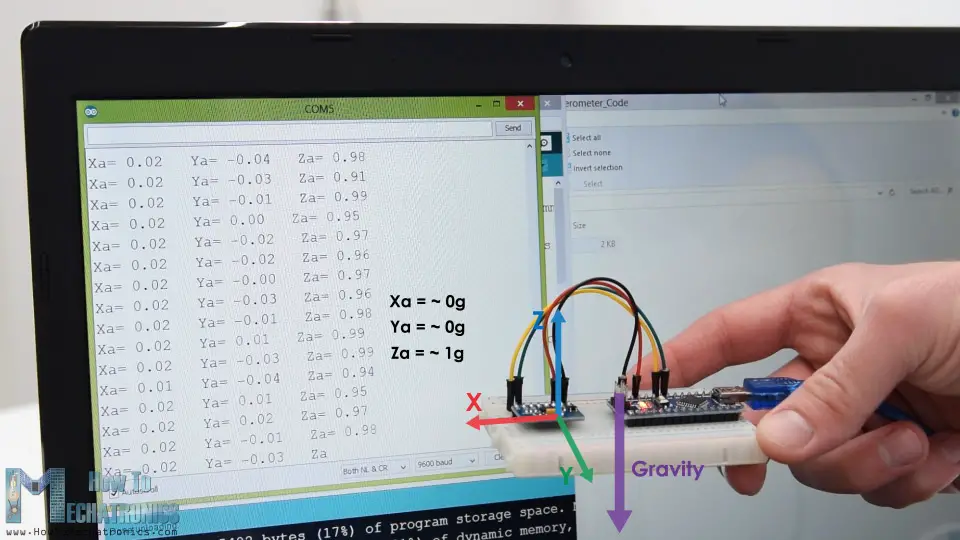
So, if we take an accelerometer positioned flat, with its Z-centrality pointing upwards, opposite to the gravitational force, the Z-axis output of the sensor volition be 1g. On the other hand, the X and Y outputs will be nada, because the gravitational force is perpendicular to these axes and doesn't affect them at all.
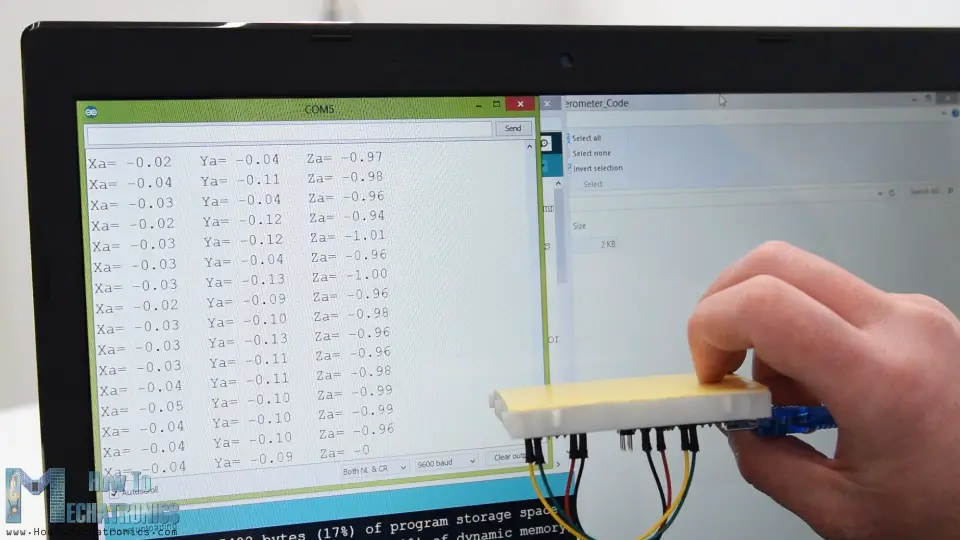
If nosotros flip the sensor upside down, and then the Z-axis output will exist -1 g. This ways that the outputs of the sensor due to its orientation to gravity can vary from -1g to +1g.
And then co-ordinate to this data and using some trigonometry math, we can summate the angle at which the sensor is positioned.
How to Read ADXL345 Accelerometer Data with Arduino
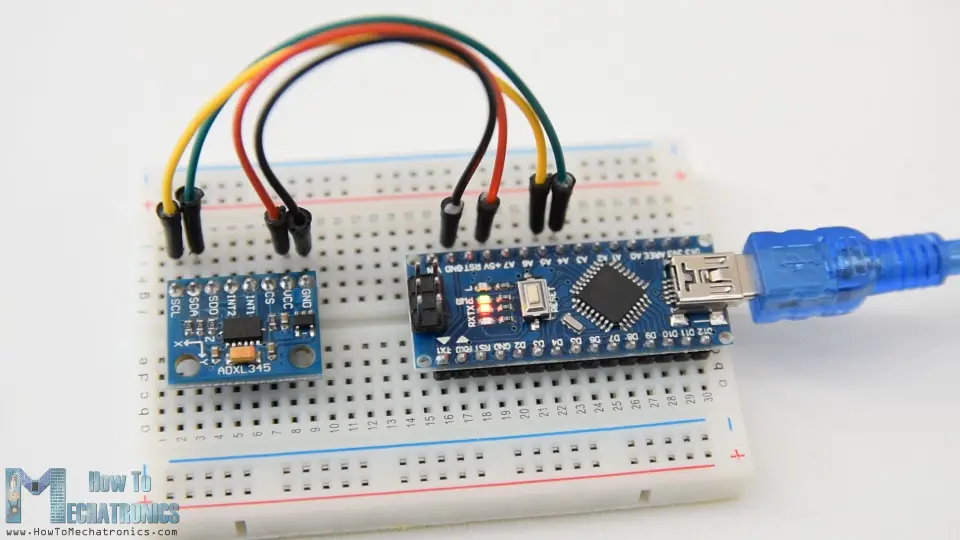
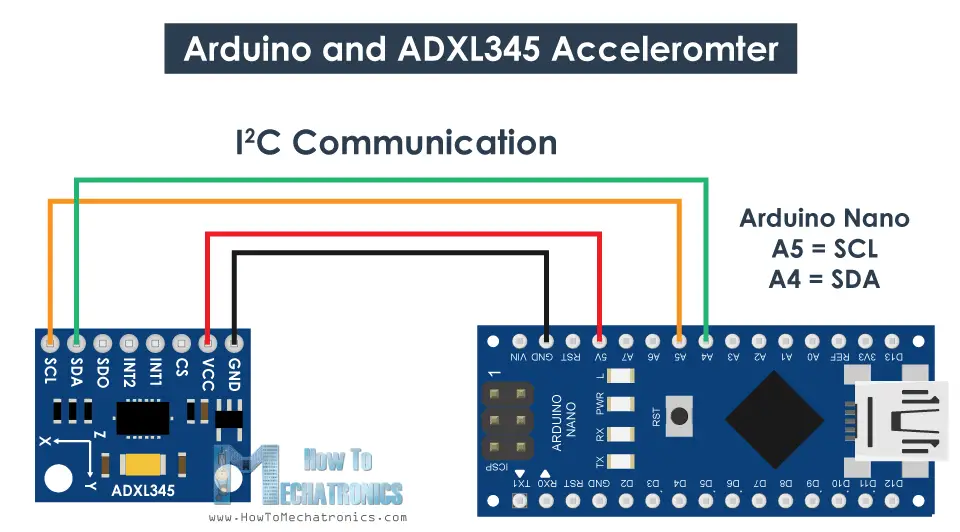
Ok, now permit's see how we can read the ADXL345 accelerometer information using the Arduino. This sensor uses the I2C protocol for communication with the Arduino and so we demand only two wires for connecting it, plus the two wires for powering it.
You can get the components needed for this Arduino Tutorial from the links below:
- ADXL345 Accelerometer ………………. Amazon / Banggood / AliExpress
- Arduino Lath ……………………………..Amazon / Banggood / AliExpress
- Breadboard and Bound Wires …………Amazon / Banggood / AliExpress
Disclosure: These are affiliate links. As an Amazon Acquaintance I earn from qualifying purchases.
ADXL345 Accelerometer Arduino Code
Here's the Arduino lawmaking fo reading the ADXL345 accelerometer data.
/* Arduino and ADXL345 Accelerometer Tutorial past Dejan, https://howtomechatronics.com */ #include <Wire.h> // Wire library - used for I2C communication int ADXL345 = 0x53; // The ADXL345 sensor I2C accost float X_out, Y_out, Z_out; // Outputs void setup () { Serial.begin(9600); // Initiate serial communication for printing the results on the Serial monitor Wire.begin(); // Initiate the Wire library // Set ADXL345 in measuring style Wire.beginTransmission(ADXL345); // Start communicating with the device Wire.write(0x2D); // Access/ talk to POWER_CTL Register - 0x2D // Enable measurement Wire.write(8); // (8dec -> 0000 one thousand binary) Chip D3 Loftier for measuring enable Wire.endTransmission(); delay(10); } void loop () { // === Read acceleromter data === // Wire.beginTransmission(ADXL345); Wire.write(0x32); // Outset with register 0x32 (ACCEL_XOUT_H) Wire.endTransmission(false); Wire.requestFrom(ADXL345, half-dozen, true); // Read vi registers total, each centrality value is stored in 2 registers X_out = ( Wire.read()| Wire.read() << 8); // X-centrality value X_out = X_out/256; //For a range of +-2g, nosotros need to carve up the raw values past 256, according to the datasheet Y_out = ( Wire.read()| Wire.read() << eight); // Y-centrality value Y_out = Y_out/256; Z_out = ( Wire.read()| Wire.read() << 8); // Z-axis value Z_out = Z_out/256; Serial.print("Xa= "); Series.print(X_out); Serial.print(" Ya= "); Serial.print(Y_out); Serial.print(" Za= "); Serial.println(Z_out); }
Lawmaking language: Arduino ( arduino ) Clarification: So first we need to include the Wire.h library which is used for the I2C communication. If y'all want to learn more than on how the I2C communication works and how to apply it with Arduino yous can bank check my other detailed tutorial for it.
Each device that uses the I2C communication has a unique I2C accost, and this address can be found in the datasheet of the sensor (ADXL345 Datasheet). So, in one case we ascertain the accost and the variables for the three outputs, in the setup department, commencement, we need to initialize the wire library and so set the accelerometer in measuring way. In order to practise that, if nosotros have a look at the datasheet again, we tin can see that nosotros demand to set the bit D3 of the POWER_CTL register Loftier.
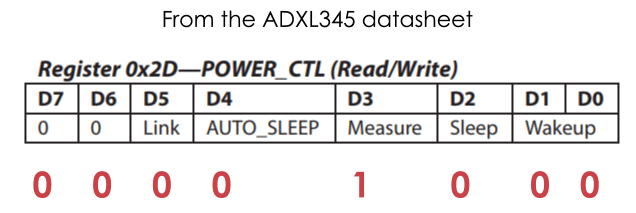
And then, using the beginTransmission() function we start the communication, then using the write() office we tell which register nosotros want to admission, and again using the write() function we set the D3 bit High, by writing the number viii in decimal which correspond to setting the chip D3 HIGH.
// Set ADXL345 in measuring mode Wire.beginTransmission(ADXL345); // Start communicating with the device Wire.write(0x2D); // Access/ talk to POWER_CTL Register - 0x2D // Enable measurement Wire.write(eight); // (8dec -> 0000 1000 binary) Bit D3 High for measuring enable Wire.endTransmission();
Code language: Arduino ( arduino ) In the loop section now nosotros read the information from the sensor. The data for each axis is stored in ii bytes or registers. We can see the addresses of these registers from the datasheet.
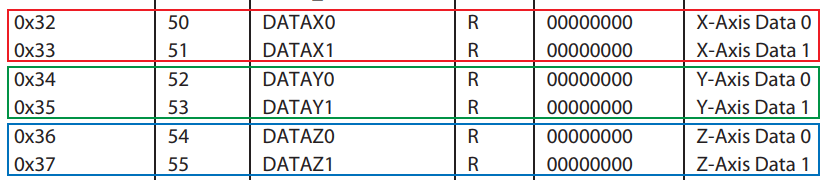
In order to read them all, nosotros start with the start register, and the using the requestionFrom() function we enquire to read the 6 registers. Then using the read() function, nosotros read the information from each annals, and because the outputs are twos complements we combine them appropriately to get the right values.
// === Read acceleromter data === // Wire.beginTransmission(ADXL345); Wire.write(0x32); // Start with register 0x32 (ACCEL_XOUT_H) Wire.endTransmission(simulated); Wire.requestFrom(ADXL345, half dozen, true); // Read 6 registers total, each axis value is stored in 2 registers X_out = ( Wire.read()| Wire.read() << 8); // Ten-axis value X_out = X_out/256; //For a range of +-2g, nosotros need to divide the raw values by 256, co-ordinate to the datasheet Y_out = ( Wire.read()| Wire.read() << 8); // Y-axis value Y_out = Y_out/256; Z_out = ( Wire.read()| Wire.read() << 8); // Z-axis value Z_out = Z_out/256;
Code linguistic communication: Arduino ( arduino ) The output values from the sensor really depend on the selected sensitivity, which can vary from +- 2g to +-16g. The default sensitivity is +-2g so that'southward why we need to divide the output past 256 in club to go values from -1 to +1g. The 256 LSB/g ways that we have 256 counts per g.
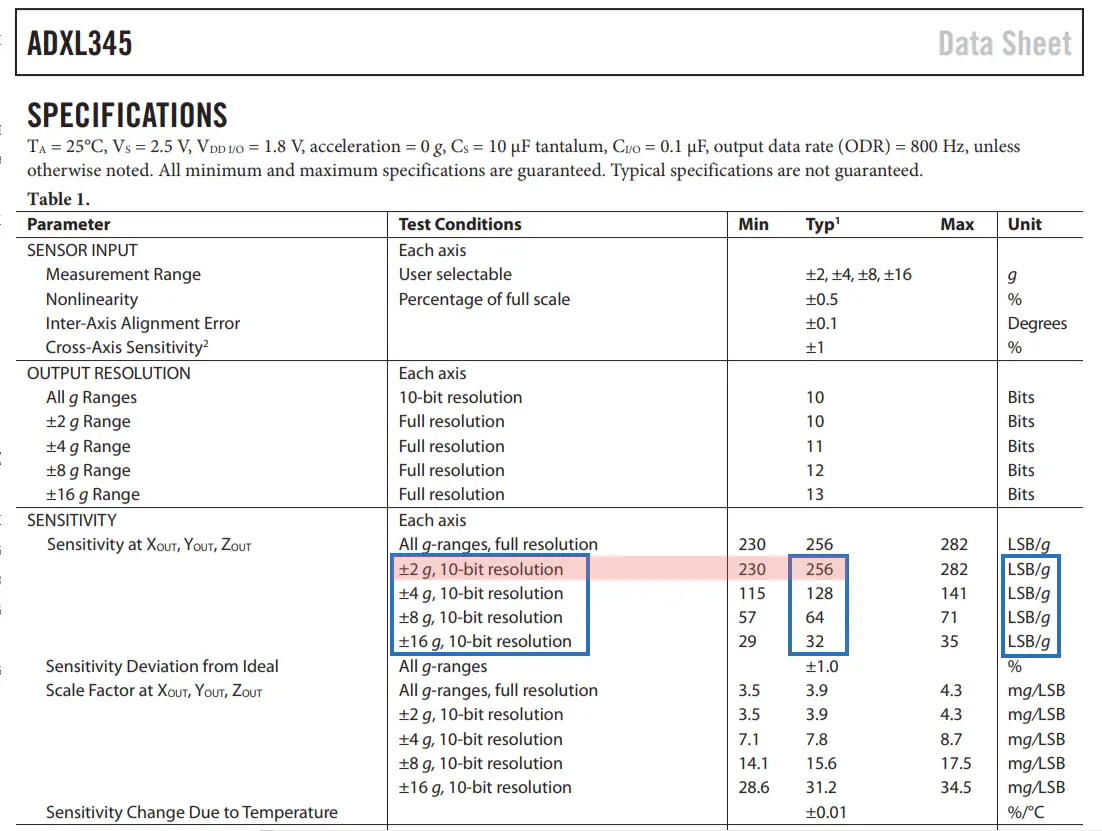
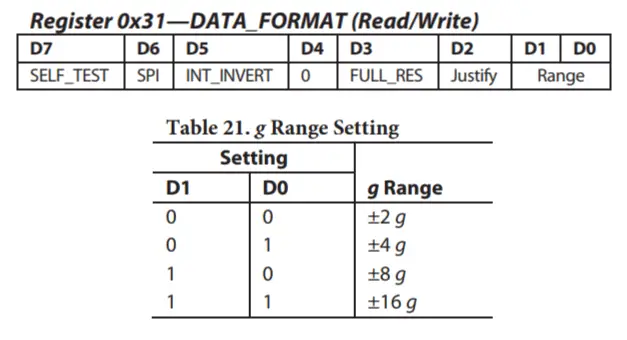
Depending on the application we can select the appropriate sensitivity. In this example, for tracking orientation, +-2g sensitivity is fine, simply for application where we need to sense college acceleration force from like sudden movements, shocks and so on, we can choose some of the other sensitivity ranges using the DATA_FORMAT annals and its D1 and D0 bits.
ADXL345 Accelerometer Calibration
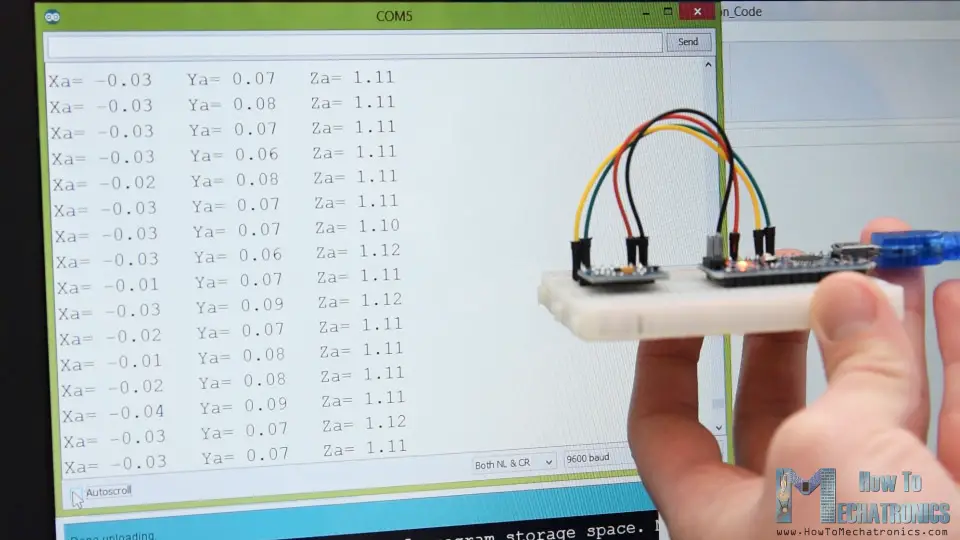
Withal, once we read the information, nosotros can simply print it on the serial monitor to bank check whether the values are as expected. In my case, the values I was getting were not exactly as they should be, especially the Z-axis which had a noticeable error of 0.1g.
To solve this issue, nosotros need to calibrate the accelerometer using the three kickoff calibration registers, and here'southward how we tin can exercise that. So, we need to position the sensor flat, and print the RAW values without dividing them past 256.
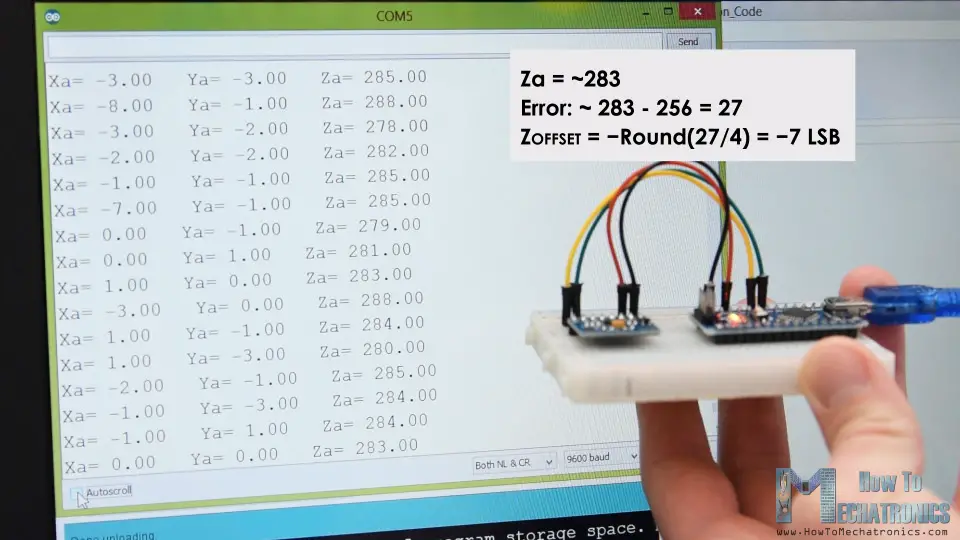
From here now we tin detect the how much the outputs are off, in my case, the Z output was around 283. That's departure of 27 in positive. At present nosotros demand to separate this value past 4, and that volition give apply the number that we need to write to the Z-centrality offset register. If nosotros upload the code now, the Z-axis output will exist exactly 256, or 1g every bit it should be.
// This lawmaking goes in the SETUP section // Off-set up Calibration //X-axis Wire.beginTransmission(ADXL345); Wire.write(0x1E); // X-axis offset register Wire.write(1); Wire.endTransmission(); filibuster(x); //Y-axis Wire.beginTransmission(ADXL345); Wire.write(0x1F); // Y-centrality first register Wire.write(-2); Wire.endTransmission(); delay(10); //Z-axis Wire.beginTransmission(ADXL345); Wire.write(0x20); // Z-axis showtime register Wire.write(-7); Wire.endTransmission(); delay(10);
Code language: Arduino ( arduino ) If needed we should calibrate the other axis using the same method. And just a quick note that this calibration is non permanently written to the registers. We need to practice write these values to the registers at each ability upward of the sensor.
Once we are done with the calibration, we can now finally calculate the Roll and Pitch, or the rotation around the X-axis and the rotation effectually the Y axis in degrees, using these ii formulas.
// Calculate Roll and Pitch (rotation around 10-centrality, rotation effectually Y-axis) roll = atan(Y_out / sqrt(pow(X_out, 2) + pow(Z_out, 2))) * 180 / PI; pitch = atan(-one * X_out / sqrt(pow(Y_out, 2) + pw(Z_out, 2))) * 180 / PI;
Code language: Arduino ( arduino ) For more details how these formulas work, you can check this Freescale Semiconductor application notation.
Arduino and ADXL345 Accelerometer Orientation Tracking – 3D Visualization
Ok, allow'south brand the accelerometer 3D visualization instance now.
And then, we are using the same lawmaking, which sends the Whorl and Pitch values through the serial port. Here'due south the complete Arduino lawmaking:
/* Arduino and ADXL345 Accelerometer - 3D Visualization Example by Dejan, https://howtomechatronics.com */ #include <Wire.h> // Wire library - used for I2C advice int ADXL345 = 0x53; // The ADXL345 sensor I2C accost float X_out, Y_out, Z_out; // Outputs float roll,pitch,rollF,pitchF=0; void setup () { Serial.begin(9600); // Initiate serial communication for press the results on the Serial monitor Wire.begin(); // Initiate the Wire library // Gear up ADXL345 in measuring fashion Wire.beginTransmission(ADXL345); // Start communicating with the device Wire.write(0x2D); // Access/ talk to POWER_CTL Annals - 0x2D // Enable measurement Wire.write(8); // Fleck D3 High for measuring enable (8dec -> 0000 1000 binary) Wire.endTransmission(); delay(10); //Off-set Calibration //X-axis Wire.beginTransmission(ADXL345); Wire.write(0x1E); Wire.write(ane); Wire.endTransmission(); delay(10); //Y-axis Wire.beginTransmission(ADXL345); Wire.write(0x1F); Wire.write(-two); Wire.endTransmission(); delay(10); //Z-axis Wire.beginTransmission(ADXL345); Wire.write(0x20); Wire.write(-ix); Wire.endTransmission(); delay(x); } void loop () { // === Read acceleromter data === // Wire.beginTransmission(ADXL345); Wire.write(0x32); // Start with register 0x32 (ACCEL_XOUT_H) Wire.endTransmission(false); Wire.requestFrom(ADXL345, half-dozen, true); // Read half-dozen registers total, each centrality value is stored in ii registers X_out = ( Wire.read() | Wire.read() << eight); // 10-axis value X_out = X_out / 256; //For a range of +-2g, we need to divide the raw values past 256, co-ordinate to the datasheet Y_out = ( Wire.read() | Wire.read() << 8); // Y-axis value Y_out = Y_out / 256; Z_out = ( Wire.read() | Wire.read() << eight); // Z-axis value Z_out = Z_out / 256; // Summate Roll and Pitch (rotation around 10-axis, rotation around Y-axis) roll = atan(Y_out / sqrt(prisoner of war(X_out, ii) + pow(Z_out, two))) * 180 / PI; pitch = atan(-1 * X_out / sqrt(pow(Y_out, two) + pow(Z_out, ii))) * 180 / PI; // Depression-pass filter rollF = 0.94 * rollF + 0.06 * roll; pitchF = 0.94 * pitchF + 0.06 * pitch; Serial.print(rollF); Series.print("/"); Serial.println(pitchF); }
Code linguistic communication: Arduino ( arduino ) Now in the Processing development environment we demand to receive these values and utilize them to rotate the 3D object that we volition create. Here'southward the complete Processing code:
/* Arduino and ADXL345 Accelerometer - 3D Visualization Example past Dejan, https://howtomechatronics.com */ import processing.serial.*; import java.awt.upshot.KeyEvent; import java.io.IOException; Serial myPort; String information=""; float roll, pitch; void setup () { size (960, 640, P3D); myPort = new Serial(this, "COM8", 9600); // starts the series communication myPort.bufferUntil('\northward'); } void draw () { translate(width/2, height/ii, 0); groundwork(33); textSize(22); text("Roll: " + int(roll) + " Pitch: " + int(pitch), -100, 265); // Rotate the object rotateX(radians(roll)); rotateZ(radians(-pitch)); // 3D 0bject textSize(30); fill(0, 76, 153); box (386, 40, 200); // Draw box textSize(25); fill(255, 255, 255); text("www.HowToMechatronics.com", -183, 10, 101); //delay(ten); //println("ypr:\t" + angleX + "\t" + angleY); // Print the values to cheque whether we are getting proper values } // Read data from the Serial Port void serialEvent (Series myPort) { // reads the data from the Serial Port upwardly to the character '.' and puts information technology into the Cord variable "data". information = myPort.readStringUntil('\northward'); // if you got any bytes other than the linefeed: if (data != null) { data = trim(data); // split up the string at "/" String items[] = separate(data, '/'); if (items.length > 1) { //--- Roll,Pitch in degrees roll = float(items[0]); pitch = bladder(items[1]); } } }
Code language: Arduino ( arduino ) Description: And then here, nosotros need to include the series library, ascertain the series port and the baud rate which needs to friction match we the baud rate of the uploaded Arduino sketch. Then we read the incoming data and put it into the appropriate whorl and pitch variables. In the main draw loop, we use these values to rotate the 3D object, and in this case that's a uncomplicated box with has a particular colour and a text on it.
If we run the sketch, the 3D object will appear and it will track the orientation of the accelerometer sensor. Nosotros tin notice here that the object is actually a scrap shaky and that's because the accelerometer captures not just the gravitational force, but also pocket-sized forces generated by the movements of our hand. In order to get smoother result, we can use a simple Low-laissez passer filter. Here I implemented such a filter in the Arduino code, which it takes 94% of the previous state and adds six% of the current state or angle.
// Low-pass filter rollF = 0.94 * rollF + 0.06 * curlicue; pitchF = 0.94 * pitchF + 0.06 * pitch;
Lawmaking language: Arduino ( arduino ) With this filter, we tin can notice that the object moves a lot smoother now, but there is also a side result and that'south slower responsiveness. We can also notice that we are missing the Yaw, or rotation around the Z-centrality. Using only the 3-axis accelerometer data we are non able to summate the Yaw.
In order to practise that and improve the overall performance of our orientation tracking sensor, we really need to include an additional sensor, a gyroscope, and fuse its data with the accelerometer.
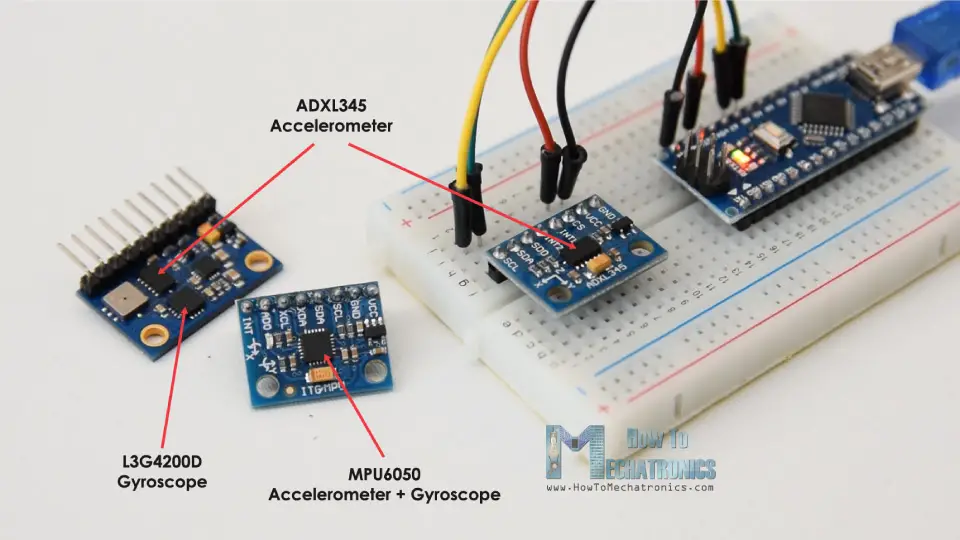
Then, we can either use the ADXL345 accelerometer in combination some gyroscope sensor, or use the MPU6050 IMU which has both 3-Axis accelerometer and 3-Axis gyroscope integrated on a single chip. You tin can find more than detailed tutorial on this sensor in my next video.
I promise you enjoyed this tutorial and learned something new. Feel free to ask any question in the comments section beneath and don't forget to check my drove of Arduino Projects.
Source: https://howtomechatronics.com/tutorials/arduino/how-to-track-orientation-with-arduino-and-adxl345-accelerometer/
0 Response to "How to Read Angle From the Adxl345 Arduino"
Postar um comentário